Hamulce to jedne z najważniejszych elementów wykorzystywanych podczas prowadzenia pociągu, więc ich poprawne działanie w pulpicie jest bardzo pożądane. Z drugiej strony są jednymi z najprostszych do zintegrowania poprzez interfejs PoKeys. Chciałbym tu przedstawić sposób kalibracji podłączonych potencjometrów o wartości 10K, które są konieczne do działania hamulców. Opis ich podłączenia można znaleźć tutaj, tutaj oraz w dokumentacji technicznej.
Potencjometry, zarówno dla hamulca zespolonego jak i pomocniczego podłączamy na wejścia analogowe interfejsu PoKeys. W moim przypadku, zgodnie z zastosowaną pinologią są to wejścia 46 i 47. Najwygodniej wykorzystać jak największe potencjometry z długą osią co pozwoli łatwo zamocować je w obudowie i dodatkowo skompensują pionowy skok podczas obrotu kranu hamulca pomocniczego. Warto też użyć potencjometrów liniowych co ułatwi ich kalibrację.
Kąt zamocowania potencjometrów nie ma większego znaczenia na ich działanie czy sam proces kalibracji, a ważne jest tylko aby ich użytkowe kąty były większe od kątów pracy danego kranu hamulca. Dobrze jest również aby każdy potencjometr miał przynajmniej niewielki zapas w skrajnym położeniu kranów. Czyli warto znaleźć potencjometry o kącie powyżej 210°, co jednak nie jest problemem. Nie muszę chyba wspominać, że potencjometry muszą być tak zamocowane aby stabilnie i powtarzalnie odzwierciedlały położenie kranów. Jeśli to wszystko zostało już zrobione i podłączyliśmy przewody do wspomnianych wcześniej pinów PoKeys, które skonfigurowaliśmy jako wejścia analogowe, to można przystąpić do sprawdzenia działania układu i kalibracji.
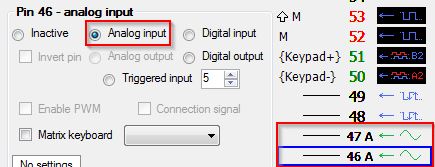
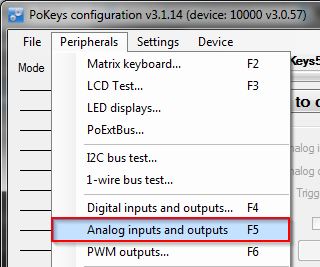
Uruchamiamy oprogramowanie PoKeys i podłączamy się do interfejsu. Następnie należy otworzyć okienko „Analog inputs” (z menu Peripherals > Analog inputs and outputs lub wciskając klawisz F5).
W otwartym oknie „Analog inputs and outputs” należy zaznaczyć wejścia 46 i 47, co spowoduje wyświetlenie odpowiedniej wartości odczytanego napięcia zgodnie z położeniem kranów, a tym samym położeniem potencjometrów. Przekręcając każdy z kranów powinniśmy zobaczyć odpowiednie zmiany napięć prezentowanych w oknie. To już jest pozytywnym efektem bo dzięki temu wiemy, że podłączenia i podstawowa konfiguracja PoKeys zostały wykonane poprawnie.
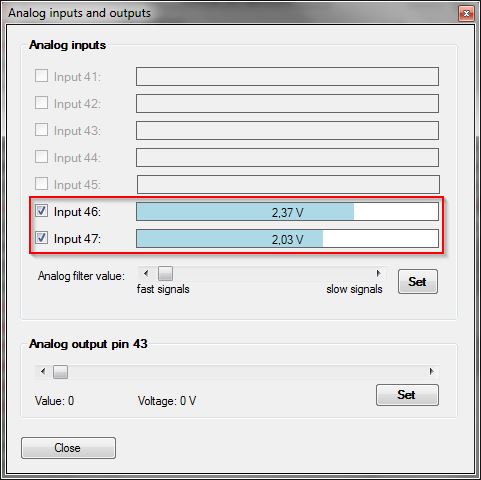
W tym samym oknie warto również zwrócić uwagę na suwak „Analog filter value:”, który pozwoli zniwelować drgania kranów hamulca w symulatorze, wynikające z niestabilności odczytu napięcia na wejściach analogowych. Położenie suwaka trzeba dobrać eksperymentalnie i najprawdopodobniej będzie ona bliska pozycji „fast signal”. Zbytnie przesunięcie w kierunku „slow signal” może negatywnie wpływać na dokładność oraz czas reakcji hamulców. Ustawienie zbyt bliskie „fast signal” będzie się objawiało niestabilnymi wartościami napięcia, a w symulatorze drganiem wirtualnych kranów hamulców.
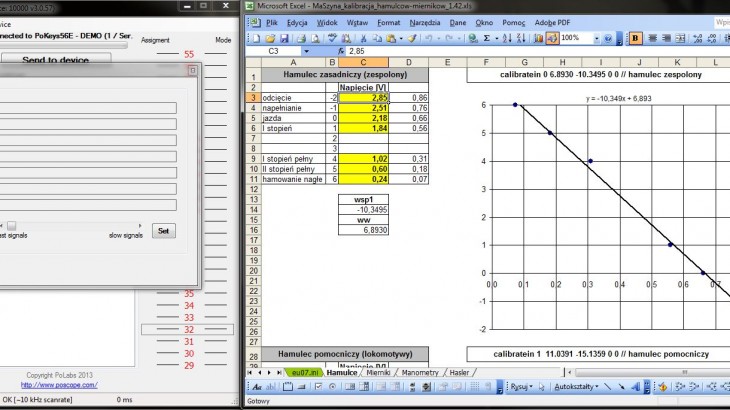
Wartości napięcia wyświetlane w oknie „Analog inputs and outputs” posłużą nam do wykonania kalibracji przy pomocy arkusza MaSzyna_kalibracja_hamulcow-miernikow.xls. Aby to zrobić należy otworzyć wspomniany arkusz tak aby mieć dostęp również do wartości napięcia z okna „Analog inputs and outputs”. Po kliknięciu przycisku „Hamulce” zostajemy przeniesieni do arkusza pozwalającego na wyznaczenie współczynników kalibracyjnych zarówno dla hamulca zespolonego jak i pomocniczego.

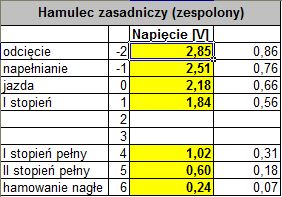
W żółtych polach tego arkusza należy teraz wpisać wartości napięcia odpowiednio dla danego rodzaju hamulca, odczytane dla odpowiednich pozycji kranów. Czyli ustawiamy kran na danej pozycji i wartość napięcia z okna PoKeys wpisujemy we właściwą komórkę arkusza.
Posiadając oryginalny zawór FV4a, znalezienie właściwych pozycji jest ułatwione, gdyż są one naniesione na obudowie. W innym przypadku można skorzystać np. z poniższego załącznika, który pomoże w znalezieniu odpowiednich pozycji tego kranu.
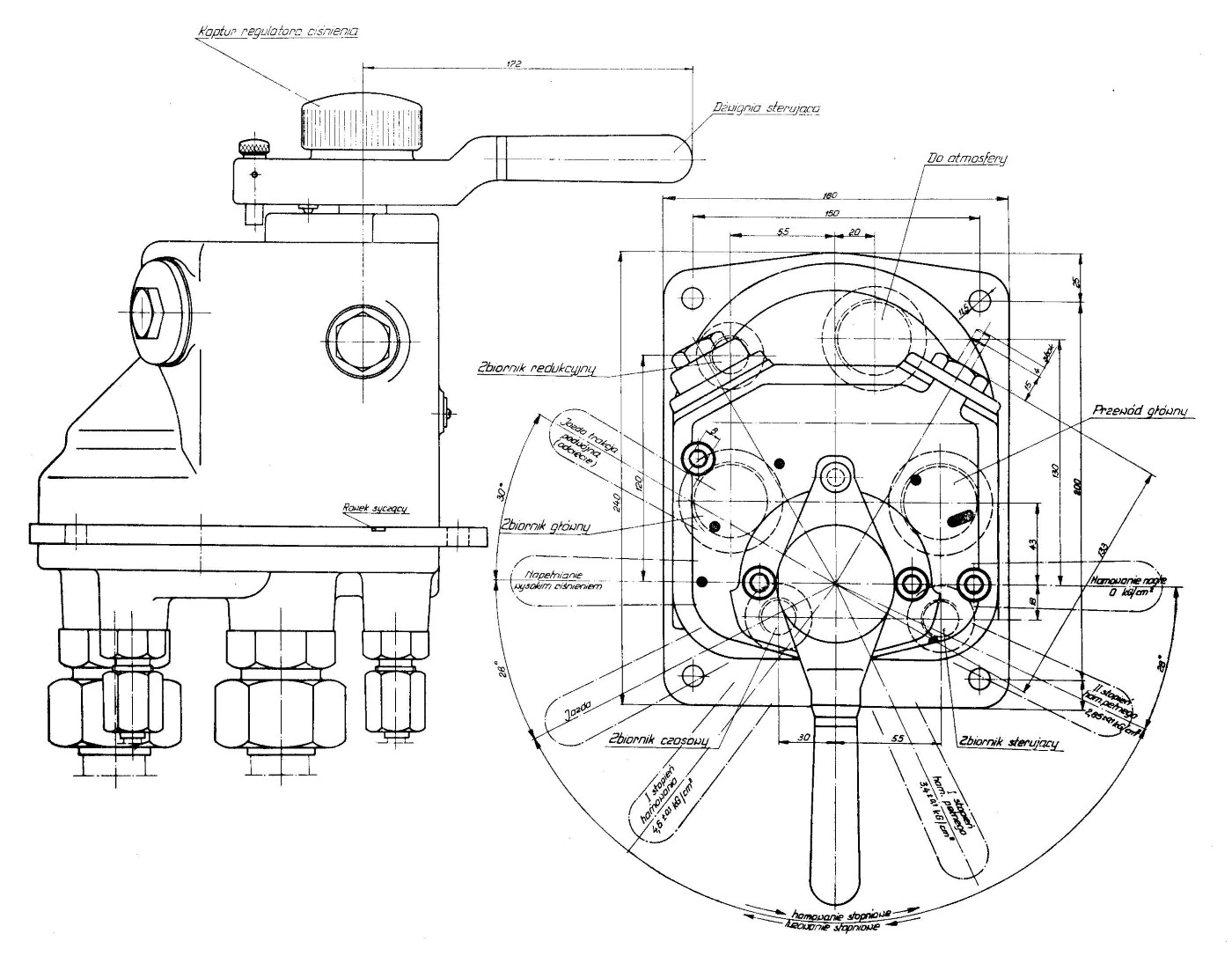
Wartości poszczególnych kątów są następujące:
- 0° – Odcięcie (jazda w trakcji podwójnej)
- 30° – Napełnianie uderzeniowe
- 58° – Jazda
- 58°-182° – Hamowanie
- 210° – Hamowanie nagłe
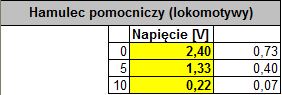
W przypadku kranu hamulca pomocniczego sprawa jest łatwiejsza, bo wystarczy odczytać tylko położenia skrajne oraz jedno położenie pośrednie, czyli trzy położenia co 90°.
Gdy użyjemy liniowych potencjometrów i nie wystąpią żadne nieprzewidywalne okoliczności, to wtedy charakterystyki widoczne na wykresach również powinny prezentować się liniowo.
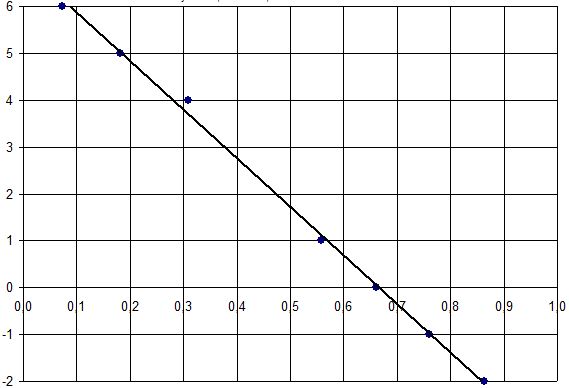
Wartości dla hamulca zespolonego
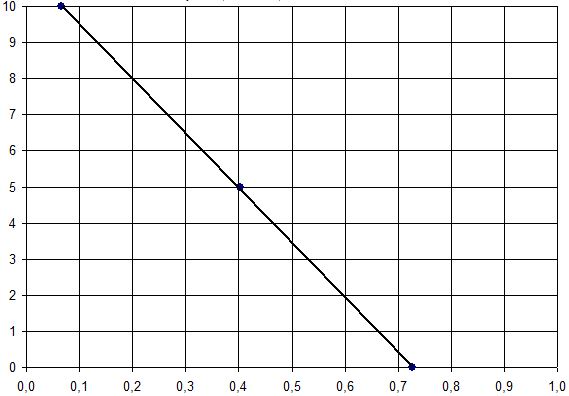
Wartości dla hamulca pomocniczego
Następnie można skorzystać z przycisku powrotu do arkusza głównego,
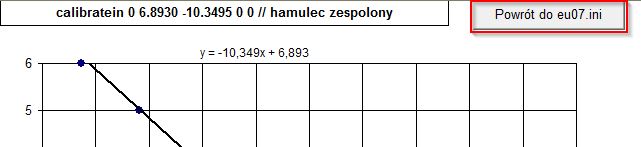
gdzie znajdziemy wyliczone wpisy kalibracyjne.

Teraz nie pozostaje już nic innego jak skopiować przynajmniej te dwie linie zaczynające się od „calibratein” i wkleić je do pliku eu07.ini znajdującego się w głównym katalogu symulatora.
Po poprawnym wykonaniu powyższej procedury i uruchomieniu symulacji powinniśmy zobaczyć jak ruchy wirtualnych kranów w kabinie naśladują obroty tych fizycznych, podłączonych za pomocą potencjometrów do PoKeys.