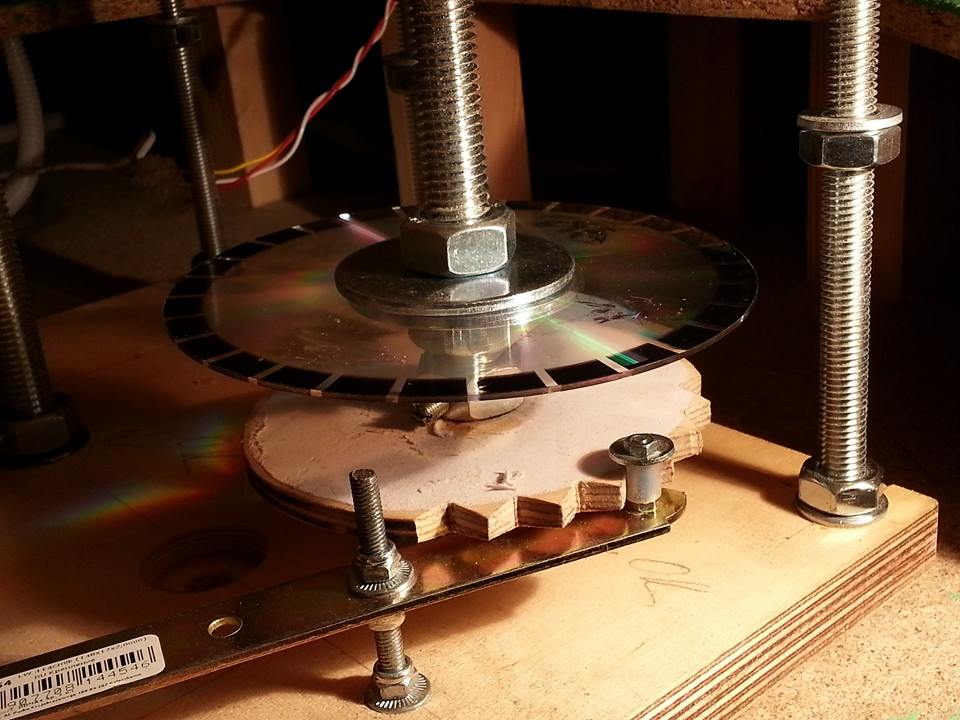
Elektronika związana z wykrywaniem ruchu nastawników została wstępnie sprawdzona, zatem przyszedł czas na stronę mechaniczną.Na podstawie rysunków oryginalnych zębatek (nastawnik ma dwie działające w większości naprzemiennie) przygotowałem sobie projekt pojedynczej zębatki. Jej zadaniem przy współpracy z odpowiednią zapadką, jest stabilizowanie nastawnika w określonych pozycjach. Udało mi się znaleźć miejsce, gdzie mój projekt został laserowo wycięty w stosunkowo grubej plexi. Zapewniło to bardzo wysoką precyzję oraz estetykę wykonania. Zębatkę osadziłem na osi (niestety o zbyt małej średnicy co trochę utrudniało dalszy montaż) na której znalazło się również koło encodera (na początku wykonane z odpowiednio zadrukowanej płyty CD, a finalnie z naświetlonego filmu graficznego dającego wysoki kontrast czerni i precyzję szczelin). Wszystko zostało ustabilizowane specjalnie przygotowanymi nakrętkami. Żeby skokowy (drgający) ruch nie powodował rozkręcania się całego mechanizmu nakrętki mają nawiercone z boku i nagwintowane otwory w których znajdują się śruby zabezpieczające każdą nakrętkę przed poluzowaniem. Jak na razie sprawuje się to bardzo dobrze. Dodatkowo koła zębate zostały umocowane na dwóch kołkach wciśniętych w górne części nakrętek tworząc swego rodzaju klucz trwale wiążący oś poprzez nakrętkę z kołem.
-


- Pototypowy mechanizm bocznika z drewnianą zębatką
-

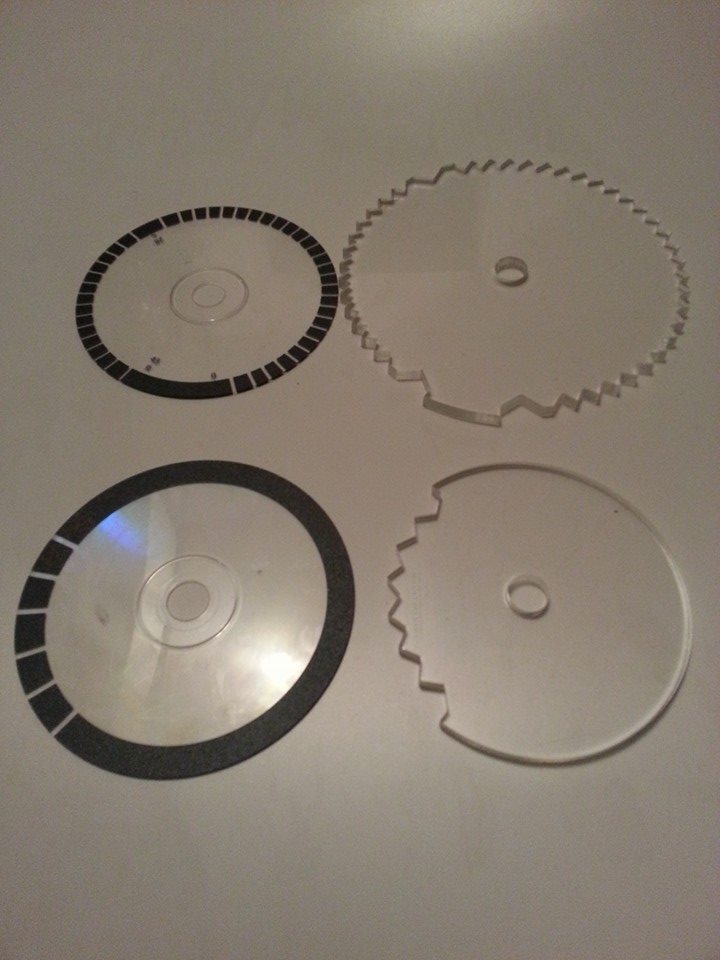
- Koła encoderów oraz odpowiadające im zębatki z plexi
-

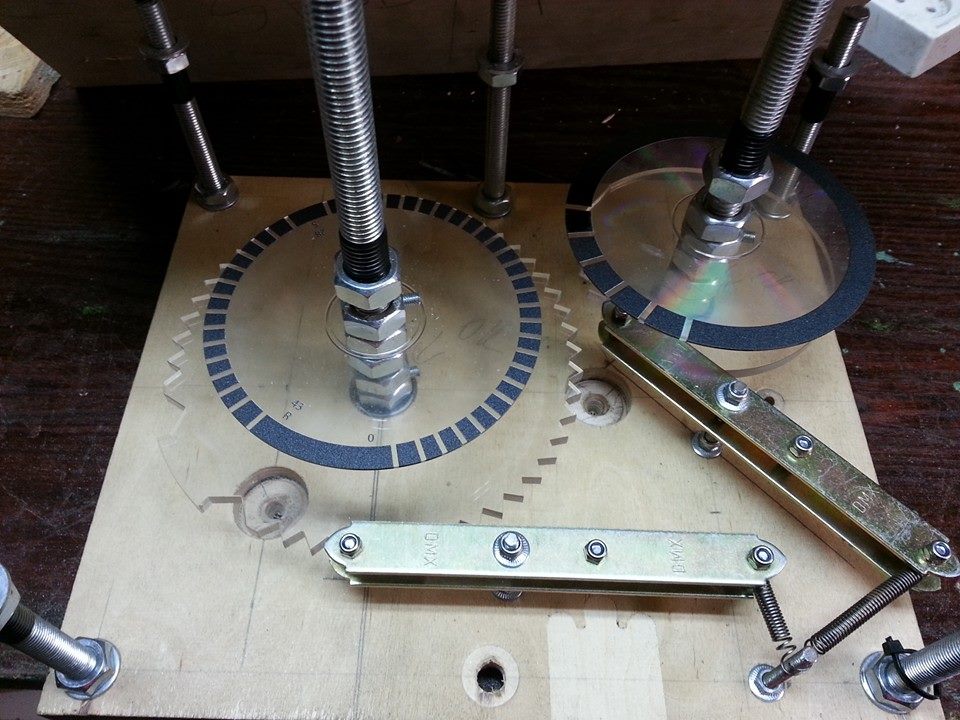
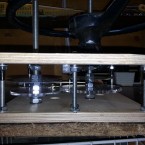
- Widok mechanizmu przed zamontowaniem górnej pokrywy
-
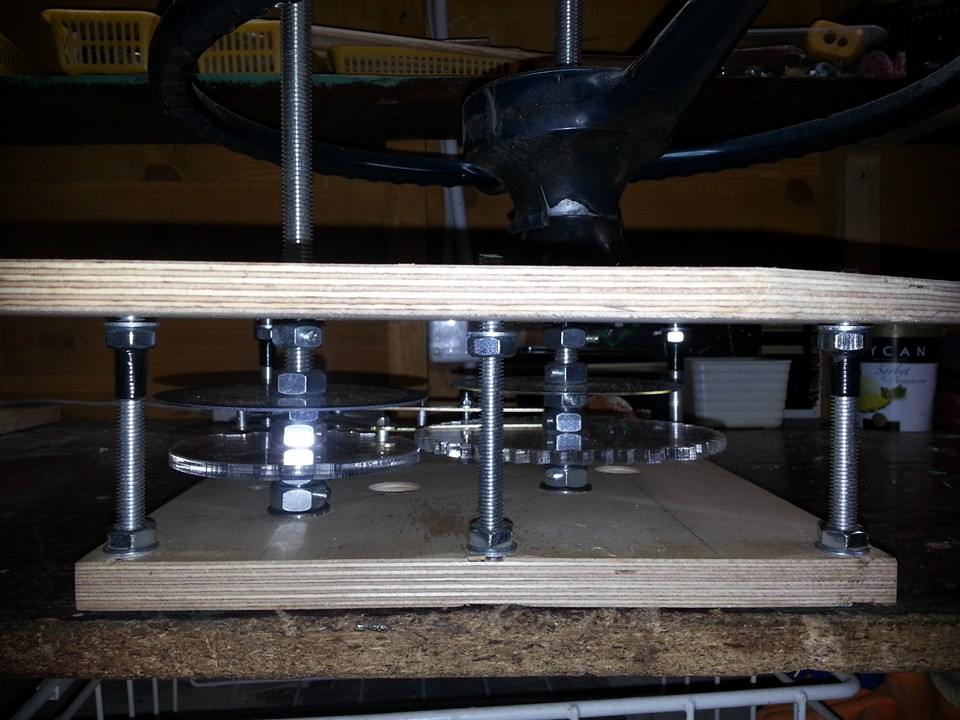
- Zmontowany mechanizm pomiędzy płytami konstrukcyjnymi
-

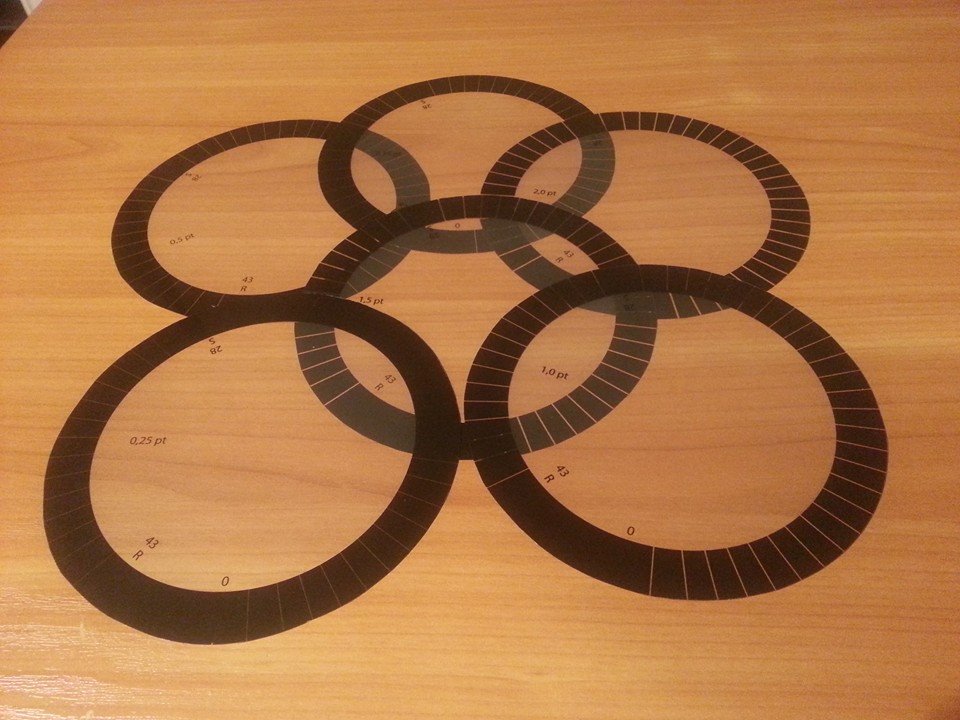
- Koła encoderów naświetlone na filme graficznym
-

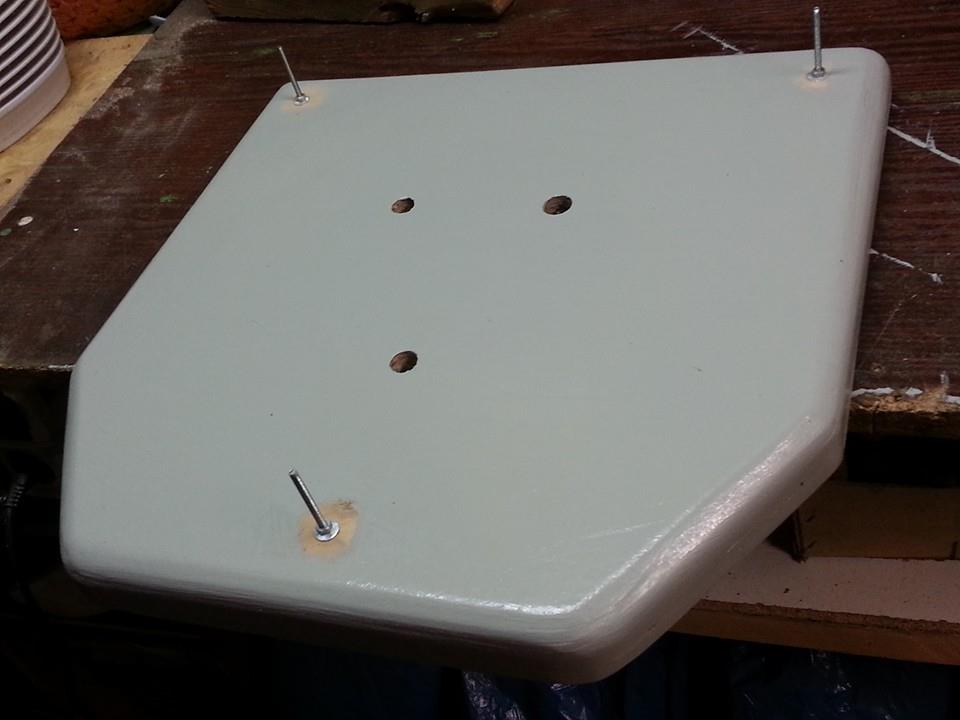
- Przygotowana pokrywa modułu nastawników
-

- Pierwsze testy świeżo zmontowanego modułu nastawników

-

- Prawie gotowy moduł nastawników

-

- Dźwignia bocznikowania musiała niestety zostać dorobiona
Osie z zamocowanymi kołami są zamocowane w płytach ze sklejki za pomocą łożysk kulkowych. Płyty sztywno skręcone na prętach dystansowych tworzą kompletny moduł, który można wstawić w obudowę pulpitu i po podłączeniu dwóch wiązek przewodów zintegrować go z całym układem. Taka konstrukcja daje możliwość zbudowania identycznego modułu wyposażonego jedynie w inaczej zaprojektowane koła zębate i odpowiadające im koła encoderów charakterystyczne dla innych serii lokomotyw np. ET22 czy EP09. Wtedy przełożenie modułu nastawników i możliwość przesiądnięcia się na inną lokomotywę trwałoby krótką chwilę.